スタジオバニマです。蚊が多くてイライラします。くるぶしとか刺してくるスナイパーがいます。
先日作った馬ロボット。
制作の流れでも紹介してみようと思います。
まず、図鑑などの資料を見ながら制作物のアウトラインを決めます。
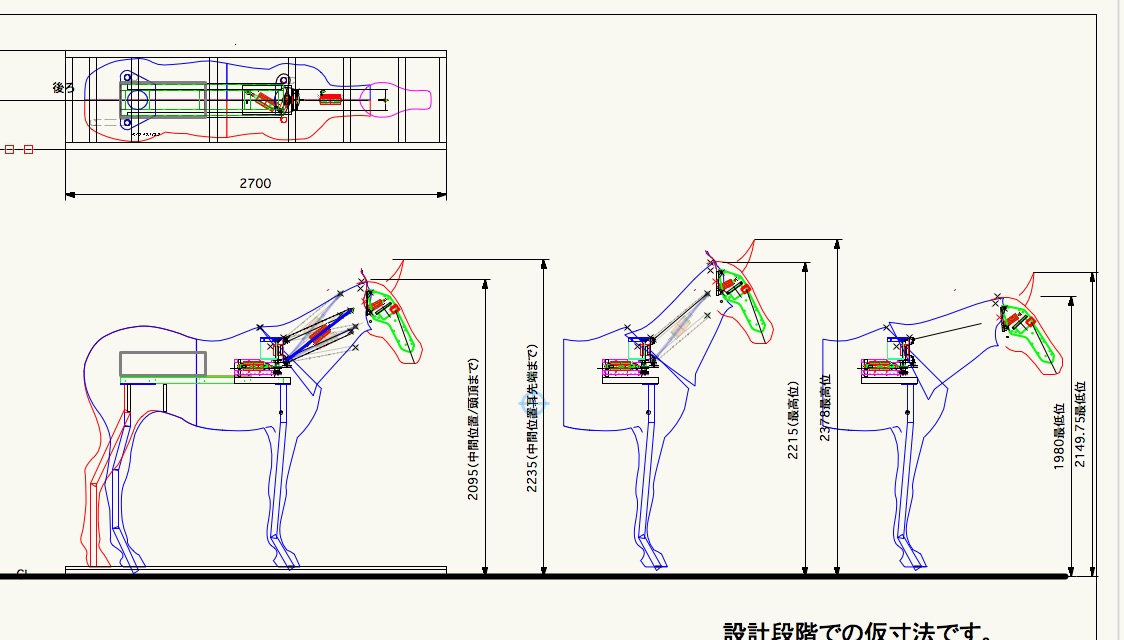
この時に、今までの実績から「適当な機構」「それっぽいスペース」を当てはめてみて本当に可能かどうかもある程度見越しておきます。
仕事には予算があって、無制限に小さくて超硬い特注の部品とかを使えるわけではありません。
一方、お客様はなるべく動くものが欲しいと思うのでwin-winの落とし所を探します。
先に仮で視覚化しておくことで、そうして出来た仕様書の説得材料にもなるわけですね。
んでこのラインに沿って発泡スチロールをカットします。

OLYMPUS DIGITAL CAMERA
2次元的にカットしたスチロールに立体ラインを描いていきます。スマホを見てるのは遊んでいるのではなくwネット上の写真なんかをしつこく観ています。
彫ります。

OLYMPUS DIGITAL CAMERA
ザックリとは熱線でカット。あとは包丁で彫ります。

OLYMPUS DIGITAL CAMERA

OLYMPUS DIGITAL CAMERA
立たなくなってきたら木工で補助脚を付けたり

OLYMPUS DIGITAL CAMERA
ひっくり返して彫ったりします。
で、出来上がり

OLYMPUS DIGITAL CAMERA
顔は別で粘土で作っています。
思ったよりムキムキなのは、製品にする時にボア(フェイクファー)を貼るので、そのせいで丸っこくなってしまうのを見越してのことです。脱いだら凄いんですよ!w
原型編はここまでです。
生き物関係はいまだにアナログな造り方ですね。一方、脚に収まる鉄骨の寸法を正確に出す(納める)ためにデジタル的にアウトラインカットしていたりもします。
なので有機的に見えつつ細い脚にカチッとした鉄骨が内蔵されていたり、が出来るわけです。
脛の辺りはΦ65mm程度の造形に対してΦ42mmの鉄パイプが角度を付けて入っています。